Even
36 414
days of the mission. Number of teams: 29
Prize fund : 444.000 HUF
News
20September2020
More videos have arrived
You can see the DeltA2 team robot here and the u-trolls here you can find a little demonstration here . A solution for sampling that is infinitely simple yet I didn't think of it. I was an adhesive party. You can also find the videos you receive next to the teams.
19September2020
Today would have been the big day
Thanks to Zoltán Niethammer for the kissBé team for being the first to submit a video showing their robot . Even 14 - I can’t really write that like this because I don’t know - robots would have competed today. When I write these lines we would eat the traditional chili beans and more with a big spoon :) I sincerely hope that everything will happen one more time. SA
15September2020
Mark may have been stuck on Mars forever
This morning, the license for the race was revoked. I don’t think you can only walk in halfway through a door. I saw the competition for the virus situation as a day of college or high school teaching. The difference is that there would have been only 50-60 students in a sports hall here. I’m sorry for the lots and lots of work invested. I want to ask everyone to send me pictures of video, I gather on one page so everyone can find out what the other team dreamed of. I even have to find out about the fees offered. SA
14September2020
Rector's instruction on coronavirus infection
As with all university students, the rector's instructions apply to us . Please review and follow the rules to protect everyone's health. Personally, I no longer expect restrictive measures in the coming days. I’m so lazy to link here to the 2018 news which is more or less relevant right now. The race will be closed to the public and we will start building the track at noon and yes we will not go back in time - unfortunately because then I would tell the world not to eat a bat. See you on Friday! SA
All entries
25Augusztus2020
Aktuális helyzetjelentés
Jelen pillanatban nincs akadálya, hogy 24 nap múlva találkozzunk Miskolcon az ufóban. Ahogy körvonalazódnak a részletek (maszk, distance...) írni fogok. S.A.
22Június2020
A verseny végleges dátuma
Soha ne mond, hogy ez már tuti, de jelen pillanatban a szeptember 19-i hétvége biztos befutó. A meteorológia szerint sütni fog a nap és így semmi akadálya, hogy Markot végre hazahozzuk. Kellemes nyarat mindenkinek! S.A.
07Április2020
Tudást adni - életet menteni
Elindult egy projekt amihez már magyarokamarsonos vén rókák is csatlakoztak. Olvasd át, gondold át és ha tudsz segíteni jelentkezz. Itt találod őket.
10Március2020
Koronavírus
Ahogy azt sejteni lehetett a mai napon az Egyetem minden csoportos rendezvényt elhalasztott így a mi versenyünket is. Szeptemberre kapunk egy új időpontot remélve, hogy akkora túljutunk ezen a megpróbáltatáson. Személy
szerint én támogatom a vezetőség felelős döntését. Ne arra gondoljatok, hogy azt a pár nap náthát majd kihordjuk lábon, mert mindenkinek van otthon olyan veszélyeztetett hozzátartózója akinek nagy eséllyel nem csak
egy tüsszentés ez a vírus. Versenyezzünk úgy, hogy ne ez miatt, hanem a pontok miatt izguljunk. Találkozunk szeptemberben, ha fúj ha esik. S.A.
1Február2020
Lunar and Planetary Institute + támogatás
Az elmúlt 14 évben a versenyen több száz kreatív fiatal mérnök csillogtatta meg tudását. Vizi Pali a verseny egyik alapítója egy összefoglaló cikkben mutat be néhány példát ezen tehetséges mérnökök -akár az űrt is megjárt-
projektjeiből. A cikk ITT olvasható. Székely Anna Krisztina ahogy sok éve már, idén is 25.000 forinttal támogatja a versenyt. A díjalap
így 425.000 Ft. Köszönet érte.
16Január2020
JABIL támogatás
Sikerült áthidalni az adminisztratív akadályokat így a töretlen támogatási szándék a mai napon révbe ért. Magyarország legnagyobb elektronikai vállalata 400.000 forinttal támogatja a versenyt. Az összeg teljes egészben
a díjalapba került. A kavarodást mi okoztuk azzal, hogy a versenyt a 2019 évről az idei évre csúsztattuk, de minden jó ha a vége jó.
12Január2020
Extra játék mindenkinek
Gondoltam meg kellene tennünk az első lépést, hogy lenyomjunk egy Teslát:) Regisztráció nélküli verseny kicsiknek nagyoknak.
A JABIL adminisztratív okok miatt visszavonta a támogatását, ezzel lyukat ütöttek a költségvetésünkbe és mellékesen a szívembe is. Szerencsére az egyetem a szervezési 100.000 Ft azaz 0.0001 milliárd Ft költséget amiből
a pénteki hidegtálas vacsorát és a szombati chilis babos, hagyományosan a Pécsi Egyetem ezirányban is magasan képzett szakemberei által készített műalkotását prezentálhatjuk átvállalta. Az is lehet, hogy valahogy majd
visszakapjuk a támogatást, de biztosat most nem ígérhetek. Dolgozom egy extra játékon olyan ottépítősön remélem a karácsonyi pár nap elég lesz hozzá:) Ja és végre valami biztos a verseny március 28-án lesz ha fúj ha
nem. Boldog Karácsonyt! S.A.
20Szeptember2019
21. csapat és egyéb örömhírek
Az elmúlt napon két dolognak is örülhettem. A Miskolci Egyetemről új csapat jelentkezett így átléptük a bűvös limitet. Hab a tortán, hogy nem voltak szégyenlősek és képet is küldtek magukról. A másik örömteli hír, hogy
a kormány 1.900.000.000 forintot (1.9 milliárd) adott a World Robot Olympiad novemberi Győrben tartandó verseny
szervezési költségeire ahova most önkéntesnek is jelentkezhettek. Részletek a WRO weblapon. S.A.
1Szeptember2019
Új időpont
Úgy néz ki a kényszer szülte őszi dátum nem vált be így a versenyt március 28-ra vagy április 4-re tettük át. Elindítunk egy plakátkampányt és a szponzorokat is intenzívebben kérleljük. Nézzük mindennek a jó oldalát.
Minden csapat kapott még 6 hónapot az építésre tesztelésre. Nincs B dátum a versenyt tavasszal megrendezzük így a befektetett munka nem vész kárba.
17Augusztus2019
Csapatok
11 csapat már a Marson, de páran még az ütős nevet keresik. Még várjuk a jelentkezéseket szeptember 1-ig.
30Május2019
Támogatás
A JABIL Circuit 400.000 forinttal támogatja idén is a versenyt így a díjalap nettó 300.000 forint. Köszönet érte. A hozzám beérkező információ morzsák alapján dolgoznak a fogaskerekek, hogy a lehető leghatékonyabb megoldást
megtalálják a csapatok. Eddig két egyforma ötletet nem hallottam ezért úgy gondolom meglepően változatos alkotásokkal fogunk találkozni a versenyen.
25Április2019
A 14. verseny első bejegyzése
Örömmel írhatom le, hogy a versenyt ezennel útjára indítjuk. Az egyetemi sportcsarnok májusi foglaltsága miatt egy tanév eleji időpontot választottunk. Letudva a vizsgaidőszakot két fesztivál között a légkondis laborban
nem is lehetne jobb időtöltés. Ahogy az elmúlt években idén is komoly díjalapra számíthatunk támogatóinknak hála.
Year after year, I have noticed that you love to push boundaries. Be it a last minute circuit, source code. To experience whether the gluing lasts for a few minutes or the max. 5V is just a warning which is not a mistake, as we learned from the AirStar team. This year, anyone who wants to win must be able to rise above the limits given by the catalog to save Mark Watney. Who wouldn't know who he is here is a short excerpt from the book:
"Mark wasn't afraid of loneliness. Yet the sight of the setting sun through the slightly dim window of the Martian dwelling module didn't seem a bit romantic. He didn't finish the calculations so long ago and the multiple-checked data always described the same dark future. who knows how many rules a smuggled goulash cream won't last until 1300 SOL.His face was reflected from the dusty window as the sky was covered in the stars.You have to find some solution.If you could get to the spaceship of that eccentric billionaire who didn't land here on the planet so long ago you shouldn't be without it for a day. His eyes wandered to the latest 3D printer that was assembled a few days ago so they could produce anything they could need. Now that the storm has ruined the rover, you might be able to rebuild it. NASA always thinks of everything - except, of course, the pepper kernel, because then it wouldn’t be in such trouble - so you need to make sure there are scaled-down parts for the prototype in the sufni. Two seconds later, he snapped off the lid of a storage box, which careful hands wrote with alcohol felt: rover spare parts 1:10. Countless tiny engines appeared on a silver sticker: 28byj- Made in China. Mark calmed down, this is an original non-European crappy copy. He found lots and lots of SG90 servos in a yellow pouf envelope. Hmm .. free shipping, wouldn't have thought The rest of the night was spent testing, which also bit Marko down. The engines turned out to be too weak, so he would just rush and not race the way he wanted. Possibly if you would switch from unipolar to bipolar and give double power. Maybe .. but the rest is history :). "
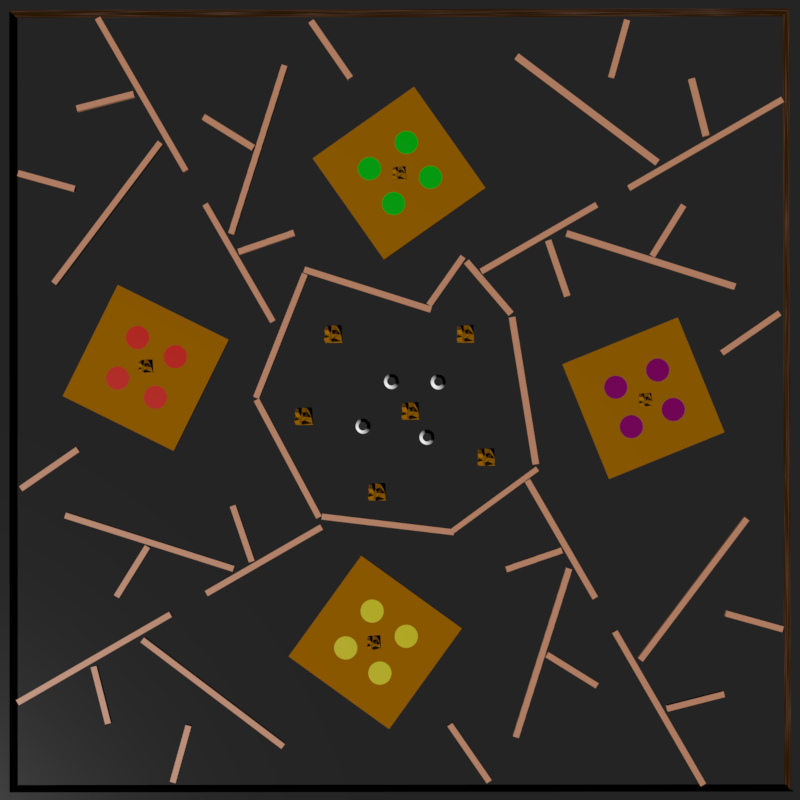
the track
The track is 8x8 meters. The four target areas are 2cm thick xps plate size 120 x 125cm. Returning spacecraft are located in the central area. The track is cut into 30mm high and 50mm wide roof slats of different lengths. You can get to the target areas by wading through them and following the maze. The track is a cover of rubber as it was in last year's race <a close-up> .
the robot
The test robot is 70% of the factory allowable current in harsh conditions.
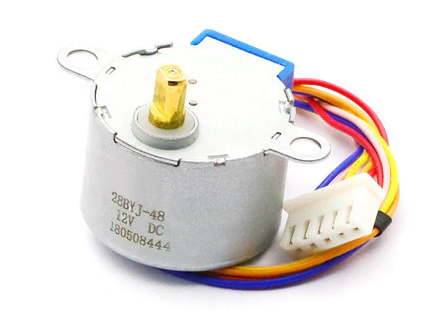
3D printing gives a level of freedom in the creative process that is simply a must-know in our world. Thanks to our Chinese brothers, we can get a truly usable printer from a European source for the price of a mid-range phone. Nowadays, rockets are printed so we can’t be left behind either, so all the mechanical elements of the robot have to be printed in 3D. Exceptions are screws 3mm or smaller and 40mm or shorter with the washer and nut. The Martian kitchen also has some masonry rubber, double-sided adhesive, duct tape, quick binder, magnet, moment and other adhesives - but no other. If you need a spring or just a simple stick then you need to print it. The material of the filament can be any. The rover can have two types of mechanically movable structures in unlimited numbers which also means that we can change them at any time during the race. One of the parts I quote here - HIGH QUALITY STEPPER MOTOR - that is, in Hungarian - there is no cheaper than it - stepper motor whose ID starts like this: 28byj and looks like this:
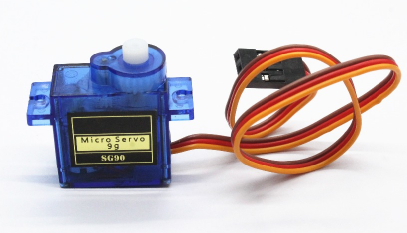
There are several variants of this stepper motor, any of which can be used. The only physical intervention allowed is if someone finds it necessary to convert the stepper motor from unipolar to bipolar. The other important component is the deservedly popular SG90 9 gram micro servo. You can use any of these to move the robot, but it can't be infinite and it can't be this type, MG90, etc. The servo arm can be used as shown in the photo. Also a photo of the challenging SG90:
The electronics and power supply of the robot are optional. Before someone can feed the robot directly from Paks, it must of course be remotely controlled and self-powered. Its size cannot be larger than 30x30x30cm. The control of the robot is real-time with the help of the control panel introduced in last year's competition, which we provide. A ten-core ribbon cable comes out of the console, ending in a 2x5 PFL-10 connector. The circuit diagram of the console can be downloaded here and a picture of Miklós Márton as he casts a spell on the console.
the target area
There are four target areas of the same structure on the course. In the 2cm high area, there are four round holes with a diameter of 20cm, which are filled with 6mm airsoft BB projectiles, similarly to 2010 , there will be no alien LED-tipped lifestyle in the middle. A minimum of 1 of this must be taken. There are balls of the same color in a target area, no matter which hole we sample. There are four of these so that even all robots can access the sample in one target area at the same time. The projectiles are different in color in the four target areas as shown in the 3D trajectory. The central area is the end of the mission. Samples and Mark Watney for extra points must also be entered into one of the four spaceships landed here. Along with the samples and Mark, any part of the robot can get into the spaceship. As for the samples and Mark should be 100% on board. The spacecraft attached to the ground is 105mm high by 109mm wide and the hole is 56mm in diameter at the top. An image of the spaceship and if anyone wants to print out the STL files they can download it here .
Mark, who is on the robot at the beginning of the mission and gets extra points if he manages to get him into the spaceship, also gets a role. Size so that Mark's height is 30mm. The original design cannot be modified (spoon-shaped head, etc.), only the small elements needed to release the grip (magnet, sheet metal, glue who knows what else) can be attached to the original body. You don’t have to put Mark on the robot if someone doesn’t want to get extra points.
Thanks to Ezra Feldman for sharing the plans at Thingiverse . Only the body needs the antenna and tube optional.
task and scoring
The goal of the mission is to pick up at least 1-1 of the different colored samples from four different locations in the shortest possible time (you can have more, but you don't get points for it) and deliver it inside the lifeboat. Each sample taken is 90 points. If this pattern gets inside the spaceship it is again 90 points. Thus, by collecting all four samples and delivering them to the spaceship, we can get a maximum of 720 points. You get 360 extra points to save Mark. In the event that all four samples are placed in the spacecraft, each remaining second is worth 1 point out of 12 minutes. 4 robots compete on the track at the same time. Teams are drawn into a group of four by a program. Based on the number of teams launched in the competition during the day, a team can compare the sophistication of its technology with others up to 3-6 times. After the first round (each team started the course 1x), the team with the most points will be joined with the team with the fewest points and the 2 teams in the arithmetic center of the scoreboard. The team with the second most points with the team with the second least points plus +2 teams from the middle of the leaderboard and so on. In case of a similar score, the alphabetical order of the team name decides. After three or four rounds, the team with the 8 most points fights a separate final for the win. You may that a team has to take on the field one after the other so please take care of a spare battery. The points earned are added up so the teams that make it to the finals can earn extra points. You have 5 minutes to place and prepare the robots. Anyone who can’t start until the end of the round can try, but the clock will tick. For whatever reason you have to go on the track then the robot has to be taken back to the starting point. Intentional obstruction damage, etc ... as in recent years this year is not allowed either. Anyone who can’t start until the end of the round can try, but the clock will tick. For whatever reason you have to go on the track then the robot has to be taken back to the starting point. Intentional obstruction damage, etc ... as in recent years this year is not allowed either. Anyone who can’t start until the end of the round can try, but the clock will tick. For whatever reason you have to go on the track then the robot has to be taken back to the starting point. Intentional obstruction damage, etc ... as in recent years this year is not allowed either. Throughout the day you can DIY, program and modify the robot. Construction of the track will begin with the packing of the room on Friday, September 20 at 12 noon. You will be able to work on the robots all night. Distribution of the prize fund according to the usual order. The amount of the prize pool is divided by the points achieved by the teams. Then we get the forint value of a point, which we multiply by the score achieved by the team, we also get the cashcp.
the venue of the competition is other info
The competition will be sport hall of the University of Miskolc and as in recent years: - Friday and Saturday night to sleep on sponges in the gym - Friday night buffet, bread and dripping red onion pepper tomato goose GULYAS cream - think beer will - Saturday night cauldron chili bean + plum with unicum
built a sampler, but I decided not to steer my thoughts in any direction. It is likely that many people besides me will find this solution, but what I love about this competition is that creativity is limitless. I’m sure surprising creations are born just to fit into the rules. No one should underestimate the complexity of the task, spend at least 2 days on it :).
If you have any questions, please write (siposattila at magyarokamarson.hu) I will try to answer quickly. Sipos Attila
Extra competition for little ones and big ones
The task is to build the fastest vehicle in the galaxy with $ 1 engines, which is up to 5 and a half times the speed of light between two 40cm wide timing gates in an arrow straight line of 5 meters. There will be two separate categories depending on the type of resource. Either using the well-deservedly popular 28byj stepper motor or the TT DC motor learned in the previous race in any number can only get the kinetic energy of the vehicle. In addition, only the size will be limited, which with noble simplicity means the vehicle must fit on an A4 sheet. Upwards, the boundary is 20cm instead of the starry sky, because the laser gate used to measure milliseconds must also end somewhere. If all this is completely round at first reading you have no problem with comprehension :) You don’t have to enter the competition just measure the times and the best ones will win a unique cup in addition to the glory. I bring with me 20-20 stepper motors with controller and tt motor for those who would like to do a little DIY there. What is worth preparing for: battery, bearing, some microcontroller panel, carbon fiber stuff (it doesn't have to be 3D printed), it will be powder extinguisher :) And what I couldn't weave into the task description is that the planes will have to start from a standstill. The dragster I built even managed to leave a fighting dog as you can see in this video:
Apply
Following last year’s traditions, you can apply in two categories. If half of the team members trample on their school years, they will receive the prize pool. The other category is the old foxes whose points do not count towards the distribution of the prize pool, but can receive a special prize, an object reward and all our recognition.
To apply, all you have to do is send a letter to siposattila at magyarokamarson.hu with the following information: -> Team name -> Team members name, age, current or ex school -> Named as a fashionable selfie about the team, similar to what Mark sent just a little more fun :) I can make a 350x350px rounded image out of it.
Possibly a phone number as a security.
Application deadline: no later than the day of the competition
If I do not reply within a day or two, there is some gas with the correspondent and the letter did not reach me. Despite my bent age, it would still be an honor to have direct contact with any age group.
Attila
teams
Essor
Tamás Bartalos (32) Matrix Education Center Tamás Bencsik (32) ex. University of Óbuda - NIK Kele István (49) ex. Gábor Dénes College Takács István (39) ex. University of Óbuda (Székesfehérvár) Andrea Rajkai (31) Pallas 75 Education Center Gyula Varga (35) ex. Ferenc Bajáki SZKI
μ-troll
Zoltán Abonyi (27) ex. University of Óbuda - KVK Bedő Sándor (28) ex. University of Óbuda - KVK Borvendég Mátyás (28) ex. University of Óbuda - KVK Petrovszki Imre (27) ex. University of Óbuda - KVK
ampere
University David Toth Noel (26) Pannonia, Information Sciences PhD, Department: VIRT University Chariot County (26) Pannonia, Information Sciences PhD, Department: RSZT Ratos Mark (26), Pannon University of Information Sciences PhD, Department: RSZT / VIRT István Sipos Krisztián (26) ex. University of Pannonia, BSc in Engineering Informatics Balázs Nánási (27) ex. University of Pannonia, Electrical Engineer BSc
.delta.2
Zoltán Szakács (33) ex. BMF Kandó Bartók Csaba (31) ex. University of Miskolc
A-Team
Király Krisztina (21) University of Miskolc, Mechatronics Engineer BSc Tamás Drozsdik (21) University of Miskolc, Mechatronics Engineer BSc Kovács Dávid (22) University of Miskolc, Mechatronics Engineer BSc Hudák Dániel (24) University of Miskolc, BSc Engineer
Pocket wrench to be shortened
University Bence Lamb (20) BSc Miskolc University Ákos Szabó Dániel (22) BSc Miskolc University Kristof Szucs (22) BSc in Miskolc
Mananaog
Nagy Lehel (22) Sapientia EMTE, Marosvásárhely (Târgu Mureş)Faculty, Quarterly Department of Automation and Applied Informatics (Captain) Demeter Katinka (24) Sapientia EMTE, Marosvásárhely (Târgu Mureş)Faculty, sophomore Communication and Public Relations (Chief Communications Officer) Mészáros Adél (23) Sapientia EMTE, Marosvásárhely (Târgu Mureş), third-year Computer Science (First Officer, Scientific Consultant) Csaba Krizbai (21) Sapientia EMTE, Faculty of Târgu Mureş, Second Year Department of Automation and Applied Informatics (Scientific Officer) Szabolcs Dalnoki (21) Sapientia EMTE, Târgu Mureş, Faculty of Automation and Applied Informatics (Chief Engineer , tactical officer) Attila Hammas (20) Sapientia EMTE, Târgu Mureş, second year Computer Science (Flag, governor) János Gáll (21) Sapientia EMTE, Târgu Mureş, second year Computer Science (Navigator, tactical officer)
TIB Robotics
Ádám Kohanecz (21) University of Óbuda Kálmán Kandó Faculty of Electrical Engineering Attila Blazsek (23) Budapest University of Technology and Economics - Dániel Csintalan (20) University of Óbuda Kálmán Kandó Kálmán Faculty of Electrical Engineering Kovács Kince (21) University of Óbuda Kandó Kálmán Faculty of Electrical Engineering Péter Szarka (22) University of Óbuda Kandó Kálmán Faculty of Electrical Engineering
Asimov
Borbély Félix (16) Clonlara School Budapest Kürti Benjámin (15) Bornemisza Péter Gimnázium Nagy Olivér Emánuel (16) Bornemisza Péter Gimnázium Budapest Petyke Bálint Bendegúz (16) Ráday Pál Gimnázium Pécel Rába Ármin András (18) ex. Clonlara School Budapest Soós Kitti Panna (16) Gödöllő Reformed High School Miklós Soós (43) ex. Budapest University of Technology and Economics (BME)
error404
Gábor Somosi (20) University of Miskolc Electrical Engineer Koncsik Alex (22) University of Miskolc Electrical Engineer
Robo Guys Forest Garden Microcontroller Club
Illés Borbély (13) Kristóf Áron Clonlara School (12) József Fabriczius Primary School Antal Serfőző (11) Hungarian-Chinese Bilingual Primary School and Gymnasium
DE-TERMINUS
Dávid Balázs (25) University of Debrecen Faculty of Engineering Department of Mechatronics Dávső Dezső (24) University of Debrecen Faculty of Engineering Department of Mechatronics Zsigmond Fekete (25) University of Debrecen Faculty of Engineering Department of Mechatronics Kovács István (23) University of Debrecen Faculty of Engineering Mec University of Debrecen Faculty of Engineering Department of Mechatronics Dávid Jonatán Varga (23) University of Debrecen Faculty of Engineering Department of Mechatronics
3Z
Zámbó Gergely Lajos (16) DSZC András Mechwart Vocational High School of Mechanical Engineering and Informatics Zámbó Szabolcs Viktor (18) Szent József Primary School, Gymnasium, Vocational High School and College Lajos Zámbó (52) Ex. University of Debrecen, Faculty of Informatics
Pathfinders
Bálint Csehi (21) University of Miskolc Mátyás Csontos (22) University of Miskolc András Hajtó (33) University of Miskolc Szalay Csongor (19) BME
LEGO circle
Tamás Farkas (22) BME - VIK Izsó András (22) BME - VIK Komáromi Sándor (19) BME - VIK Móna Dániel (22) BME - VIK Móricz Tamás (23) BME - VIK Puskás Tímea (21) BME - VIK Rózsa Dániel (21) BME - VIK Tóth Ádám Raymond (24) BME - VIK Ugrin Dániel (23) BME - VIK
RobotoSOKK
Bíborka Kaszász (23) University of Miskolc Tamás Holló (21) University of Miskolc
K2
Kriston Dávid (23) University of Miskolc, Electrical Engineer BSc Kriston Gergely (14) Szent István Catholic Primary School
Schwifty Robotics
Almásy Márton (23) OE Koór Levente (18) ELTE Novák Emil (22) ELTE Szoták Soma (22) ELTE
DÖMÖTÖR
Buga Dániel (29) ex. BME Dudás Dávid (29) ex. BME Gliga Péter (29) ex. University of Debrecen Electrical Engineer Márton Miklós (28) ex. University of Debrecen Electrical Engineer
BV elektronX
Roland Béczi (24) University of Miskolc Electrical Engineer Révész Viktor (21) University of Miskolc Electrical Engineer
Kakooscsiga
Anga Dávid (20) University of Miskolc Electrical Engineer Balázs Endrész (22) University of Miskolc Electrical Engineer Pető Alex (22) University of Miskolc Electrical Engineer
Apple
Attila Nagy (22) University of Miskolc Electrical Engineer Bence Nagy (22) University of Miskolc Electrical Engineer
Sapy Entity
Dénes Csaba Antal (21) Sapientia EMTE, Automation and Applied Informatics Tamás Loránd Márton (20) Sapientia EMTE, Automation and Applied Informatics Szeibert Xavér (19) Sapientia EMTE, Computer Science Király Zsolt (21) Sapientia EMTE, Informatics Barabás - Vincze Orsolya (21) ) Sapientia EMTE, Informatics Ágoston István (23) Sapientia EMTE, Informatics
gauge
Dávid Varga (19) University of Miskolc, Electrical Engineer BSc Sipos Szilárd (18) University of Miskolc, Electrical Engineer BSc Bárdos Krsztián (20) University of Miskolc, Electrical Engineer BSc Knapp Noémi (19) University of Miskolc, Electrical Engineer BSc
TrustME
Ádám Hegyi (23) University of Miskolc MSc in Electrical Engineering Gábor Hegyi (23) University of Miskolc MSc in Electrical Engineering Ádám Varga (22) University of Miskolc MSc in Electrical Engineering
interdisciplinary
Mező Sándor (20) ME-GEIK Mechatronics Engineer BSc Dráviczki Róbert (20) ME-GEIK Mechatronics Engineer BSc Pucsok Sándor (21) ME-GEIK Mechatronics Engineer BSc Magyari Norbert (20) ME-GEIK Mechatronics Engineer BSc Szabó Sándor (21) ME -GEIK Mechatronics Engineer BSc
History of the competition
Kiskunhalas
A robot had to be built to locate the metal sheet hidden under the sand and bring the sample back to the starting base.
We placed 20 3x3-centimeter energy cubes on the 8x8-meter sand-covered ‘marson’. Energy could be extracted by the robot glowing exactly on top of the cube for 5 seconds. The winning team managed to extract 9 dice
A little more than 1 liter of water was hidden by the ‘mars’, which burst to the surface in 6 small ponds. The final ranking was the amount of water collected.
A robot had to be built to find the special ‘Martian’ flower on the gravelly terrain. It reads the DNA sequence and then takes a sample from another organism. This pattern is carried by a space elevator to a space station orbiting Mars. You had 30 minutes for this task. Of course, there were teams that didn’t need that much time.
An insect-like robot had to be built that could navigate in harsh ‘Martian’ conditions with minimal human intervention. The goal is to populate as many areas as possible and protect your valuable robots from other robots.
It was necessary to build a small two-wheeled robot that could even move autonomously through the streets of Mars City. The real challenge is to control the unstable two-wheeled mechanics and the short 3 months available for implementation.
This year, an air-cushioned robot had to be made that could be controlled with hand gestures. Sensors could be located from the fingertip to the wrist. The robot had to perform complex movements to be able to deliver tiny dice to targets of different sizes placed on the field.
Unlike the previous competitions, it was not a pre-determined task that had to be carried out in the home workshop, but a robot had to be built in 18 hours from the unit package distributed on the spot. The package included 4 servos, a battery with an A4 size double sided printed circuit board + 1m aluminum tube. Control had to be solved with the help of a potentiometer and two pushbuttons.
This year’s competition is a real challenge for digital image processing. Robots need to orient themselves autonomously in a terrain where they can only rely on their ‘eyes’ in the visible and infrared range. Of course, we also thought about the emerging generation so it is possible to get points with the help of a 'magic button'.
The task was to build magic spheres i.e. spherical robots. With robots with a maximum diameter of 25cm, the flag had to be set to the color of the team in 9 arenas. To control it, a magic wand also had to be built, by moving which the teams navigated the robot on the field.
We returned to Mars this year. Each team had to work from a kit of parts that included a 6 dc motor, two battery servos and other small parts. The task was to puncture the balloons in the same color as the team on the field in as little time as possible.


 Anna Krisztina Székely
Anna Krisztina Székely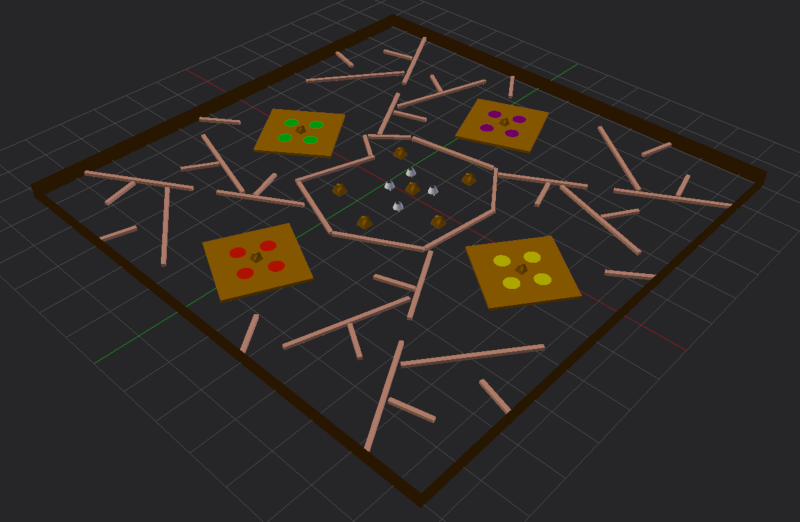

































{kind=link}
.jpg){kind=link}
{kind=link}